
 Intermediae
Intermediae
Intermediae


Descripción
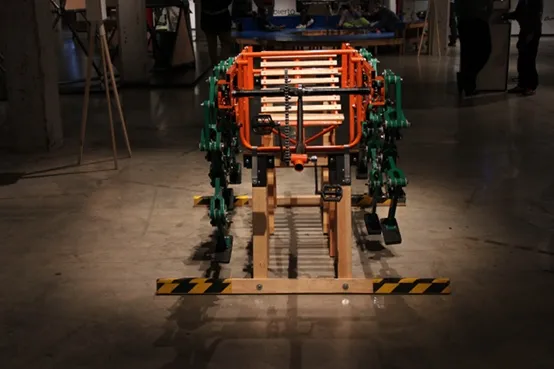
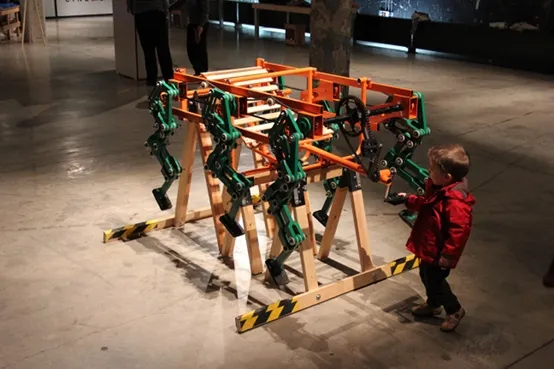
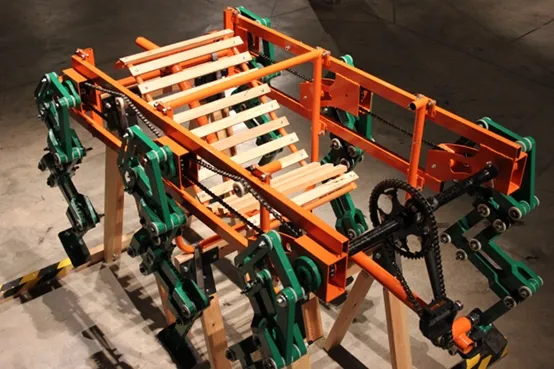
Biomímesis. Simulador biomimético de locomoción animal terrestre
Byron Iram Villamil Villar y Miguel Uribe Becerra
Del 27 de octubre de 2012 al 3 de febrero de 2013 en Intermediae
La Biomimética (bios=vida mímesis=imitar) se presenta como una disciplina que adopta el uso práctico de mecanismos, funciones, formas y procesos que estudian las ciencias biológicas, para la aplicación en diversas especialidades, entre ellas el Diseño Industrial. Uno de sus principales objetivos es fusionar de manera efectiva el concepto de sustentabilidad dentro de la tecnología, con esa clara base biológica y ecológica, promulgando que las leyes y los elementos de la Naturaleza son capaces de enseñarnos el camino hacia una evolución en los paradigmas del Diseño, asumiendo una perspectiva holística al tratar de emular formas, procesos o estrategias, logrando así una verdadera simbiosis al proyectar productos, mensajes o ambientes acordes con los seres vivos, sus interacciones y su biodiversidad. El proyecto de creación “Biomimesis, Simulación de la locomoción animal terrestre”, se apega a las ideas de la sostenibilidad ecológica y por ello su objetivo de simular los sistemas de locomoción animal terrestre mas que arrojar resultados aplicables de inmediato, nos aproxima al entendimiento de las formas de locomoción y cómo ellas pueden producir nuevas ideas sostenibles para el desplazamiento humano.
Inicialmente el equipo de trabajo (formado por un ingeniero mecánico y filósofo, un biólogo y algunos maestros en Diseño Industrial) abordó el reconocimiento de la sistemica animal intentando crear un mapa cada vez más preciso en cuanto a las formas de desplazamiento y locomoción terrestre dentro del enorme ¨arbol sistémico¨ que representa parte de la vida en el planeta; de allí partimos a reconocer las cualidades especificas de los diversos grupos (Arácnidos, Insectos, Miriápodos, Crustáceos, Gasterópodos, Oligoquetos, Anfibios, Reptiles, Aves y Mamíferos) e identificar aquellos especímenes que mejor los representaban en cuanto a su locomoción. Se tuvieron en cuenta sus ventajas mecánicas, la prevalencia de los artrópodos que por su singularidad presentan cualidades únicas y se agruparon aquellos que muestran grandes similitudes. De esta forma se establecieron 5 grupos característicos: 1. Saltadores, 2. Caminadores, 3. Peristálticos, 4. Ondas sobre líquido no newtoniano y 5. Ondas.
Para cada uno de ellos se eligieron especímenes específicos que se pudieran estudiar o por lo menos observar de manera directa. Para cada uno de estos se acopió información relevante, además de fotografías y vídeos tomados de manera directa en el zoológico y en campo abierto, lo que sirvió para establecer tiempos y ritmos en la locomoción y sobre todo para hacer el análisis de los segmentos articulares y hacer las mediciones correspondientes. Habiendo desarrollado esta descripción detallada desde los ángulos de barrido de cada segmento articular, se afirmaron las agrupaciones iniciales y se realizaron las comparaciones posibles y se llegaron a las primeras conclusiones, que se pueden apreciar en la lectura de las gráficas producidas para tal efecto. Luego se inicia el desarrollo de un mecanismo móvil que permita reproducir los diferentes movimientos encontrados, teniendo en cuenta la limitación impuesta al plano de avance, dado que expresarlo en los planos de las tres dimensiones por ahora solo hacia mas complejo el estudio y no aportaba al logro del desplazamiento de avance. A partir del mecanismo desarrollado se realizaron las simulaciones mecánicas posibles, a partir de la modificación de tanto los radios como las longitudes de los segmentos intentando acercarse a los encontrados en los diferentes especímenes determinados, lo cual nos acerco cada vez mas a la simulación biomimetica y al logro del objetivo del proyecto. Se han conjugado en este mecanismo los principios y variables de diferentes especies, rescatando de cada una de ellas sus atributos y cualidades. Finalmente se ha diseñado un simulador biomimetico que reúne las posibilidades de ajuste a diferentes especies, con mecanismos simples que permiten la comprobación y medición.
Agentes
Byron Iram Villamil Villar es Profesor asociado del Departamento de Diseño de la Facultad de Artes Integradas de la Universidad del Valle, Cali, Colombia. Licenciado en Diseño industrial por la Universidad Nacional de Colombia (Bogotá), y Maestro en Diseño y Desarrollo de Nuevos Productos por la Universidad de Guadalajara (México) / byron.villamil@correounivalle.edu.co
Miguel Uribe Becerra es Profesor asistente Departamento de Diseño de la Facultad de Artes Integradas de la Universidad del Valle Cali, Colombia. Licenciado en Diseño industrial por la Universidad Industrial de Santander (Bucaramanga, Colombia) y Especialista en marketing por Universidad del Valle (Cali, Colombia) y Maestro en Diseño Industrial por la Universidad Nacional Autónoma de México (México) / angel.uribe@correounivalle.edu.co
Detalles
Del 24 de octubre de 2012 al 31 de enero de 2013 en Intermediae
Byron Iram Villamil Villar : "Sostenibilidad y Mímesis. Analogía en el diseño para la vida".
Miguel Uribe Becerra : "Representación de la locomoción animal terrestre. Estrategias gráficas de análisis del movimiento animal terrestre para el desarrollo de simuladores biomiméticos".
Proyectos relacionados
Finished

Semana de la Ciencia
Modelado y visualización molecular en biología Actividad realizada en el marco de Semana de la Ciencia Bioengineering and Aerospace Engineering , Universidad Carlos III de Madrid, Asociación Creática , coordinado por Javier
Finished

Encuentro sociología ordinaria #4
Encuentro Sociología Ordinaria #4 / El deseo también es ordinario Grupo de investigación Sociología Ordinaria (Elena Casado, Antonio García y Amparo Lasén) Miércoles y jueves 4 y 5 de mayo a las
Finished

DocumentaMadrid'15
#HacerWebDoc DocumentaMadrid'15 5 y 6 de mayo de 16 a 19 h. y de 16 a 20 h. #hacerwebdoc celebra su segunda edición en Intermediae dentro del marco de DocumentaMadrid'15. #hacerwebdoc pretende